インタビュー
「生き物のように、動く機構」杉原 寛さん インタビュー(前編)
6月某日、雨の日。駒場にある東京大学山中研究所主催の『Parametric Move 動きをうごかす展』にお邪魔して来ました。今回は、クマ財団2期生として採択された、杉原 寛さんのインタビューを前・後編に分けて、お送りいたします。聞き手は、財団職員の桐田です。

【杉原 寛(すぎはら ひろし)】
機械工学を専門に修士よりAM(Additive Manufacturing、いわゆる3Dプリンティング)を活用したロボットの制作に取り組む。独自機構を搭載したAM一体成形ロボット「READY TO CRAWL」がARS ELECTRONICAの招待展示、収蔵品選定を始め国内外で展示される。その他、動きによる驚きやワクワクの創造をテーマにメカ、機構の開発を行う。
(以下の文をお読みになる前に、杉原さんの「READY TO CRAWL」、その独特な「動き」を見ていただきたく思います。ぜひ、こちらの動画をご覧ください!)
_______________________________________________
桐田:こんにちは。今日はお時間いただき、ありがとうございます。
杉原:いえいえ、こちらこそ雨の中、ありがとうございます。
桐田:こちら(動画手前)が、今回の展示で作った作品ですか?
杉原:はい。左のダイアルを回すと、この軸の回転を脚の動きに変える、カムの傾きが変わるようになっていて。カムが傾くと、脚の先が前後にスライドしていくような動きが加わります。
それで、右のダイアルを回すとカムが回転軸に対して偏心していって、脚が上下していく「波のような動き」が加わるようになっています。この2つを組み合わせることで、「歩く動き」ができるようになっていて。
桐田:ああ、すごい。じゃあ今回の作品は『READY TO CRAWL』の機構自体を、鑑賞者の人が「動かす」ことに挑戦してみたって感じなんでしょうか。
杉原:そうですね。だから今回のは結構、だいぶ、科学教材的な趣きが(笑)。あとは機構が好きな人が、喜びそうな感じです(笑)。
『READY TO CRAWL』とは?
桐田:杉原さんの『READY TO CRAWL』、面接やキックオフの時に見せていただいた時から、もっとじっくり見たいと思っていたんです。どれも違う形ですけれど、どんな仕組みで動いているんでしょうか。

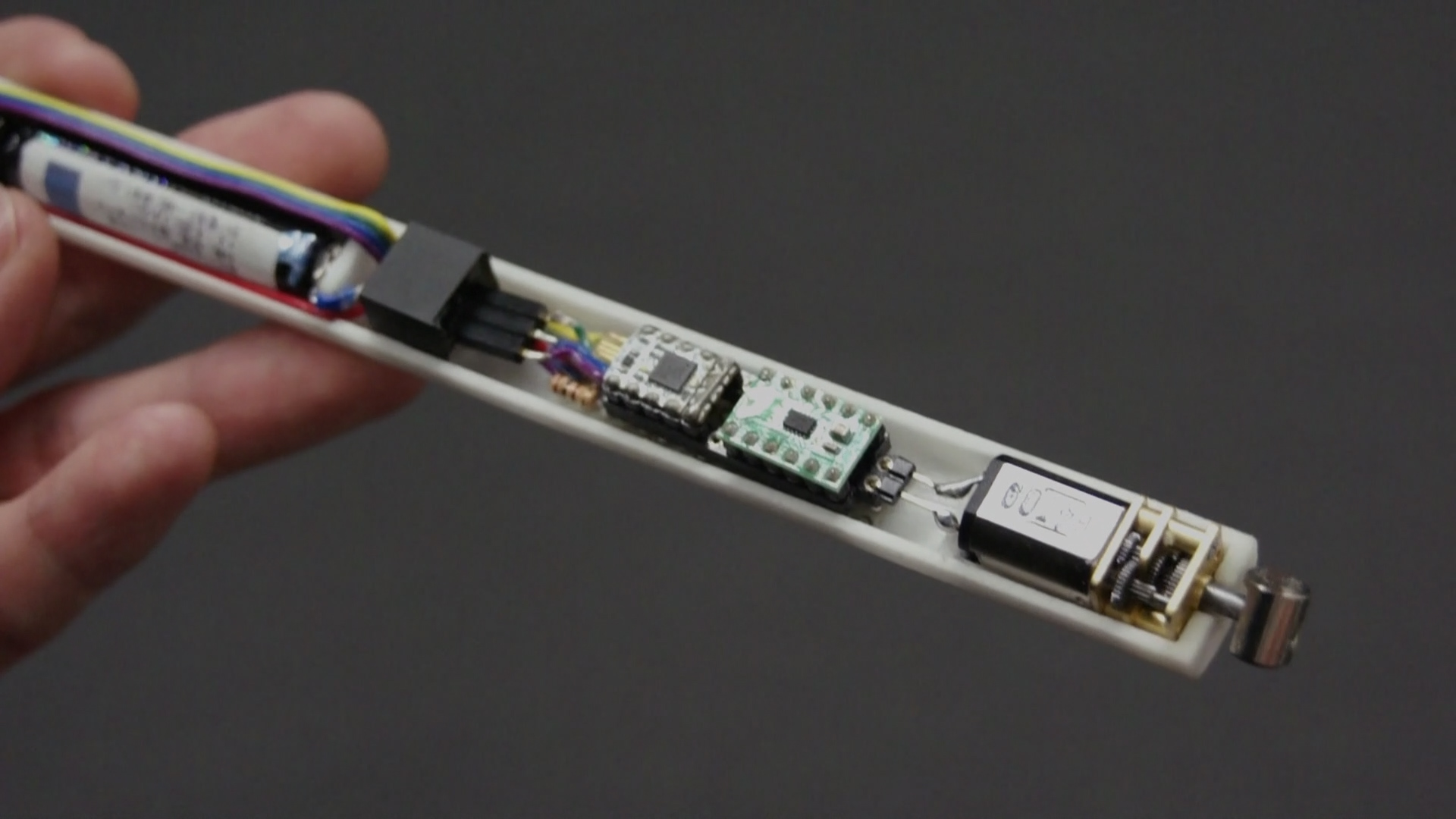
杉原:『READY TO CRAWL』は全て、本体も部品もすでに「一体」になった状態で成形する「一体成形」というコンセプトで制作しています。メインのボディは3Dプリンターを使って1発でプリントしていて、モーターなどの電子部品だけ、あとでこの機構の軸の中に入れています。なので、本体は生物のように完成した姿で生まれてきて、あとは電子部品が入った軸を差し込むだけで、動くようになっています。

桐田:なるほど。この機構の形もとても独特ですが、そもそもなぜこういう機構を開発されたんでしょうか。
杉原:3Dプリンターの一体成形で機械を作る場合、今の3Dプリンターだと、まだそこまで造形精度が良くなくて。機械によく使われるギアやリンクを使った、複雑で精度が必要な機構を3Dプリンターで一体成形するとなると、なかなかスムーズに動かなかったんです。だからこれまでの機械的な構造(機構)にはない、そもそもの新しい「機構」自体から開発していきました。
桐田:機構そのものから。
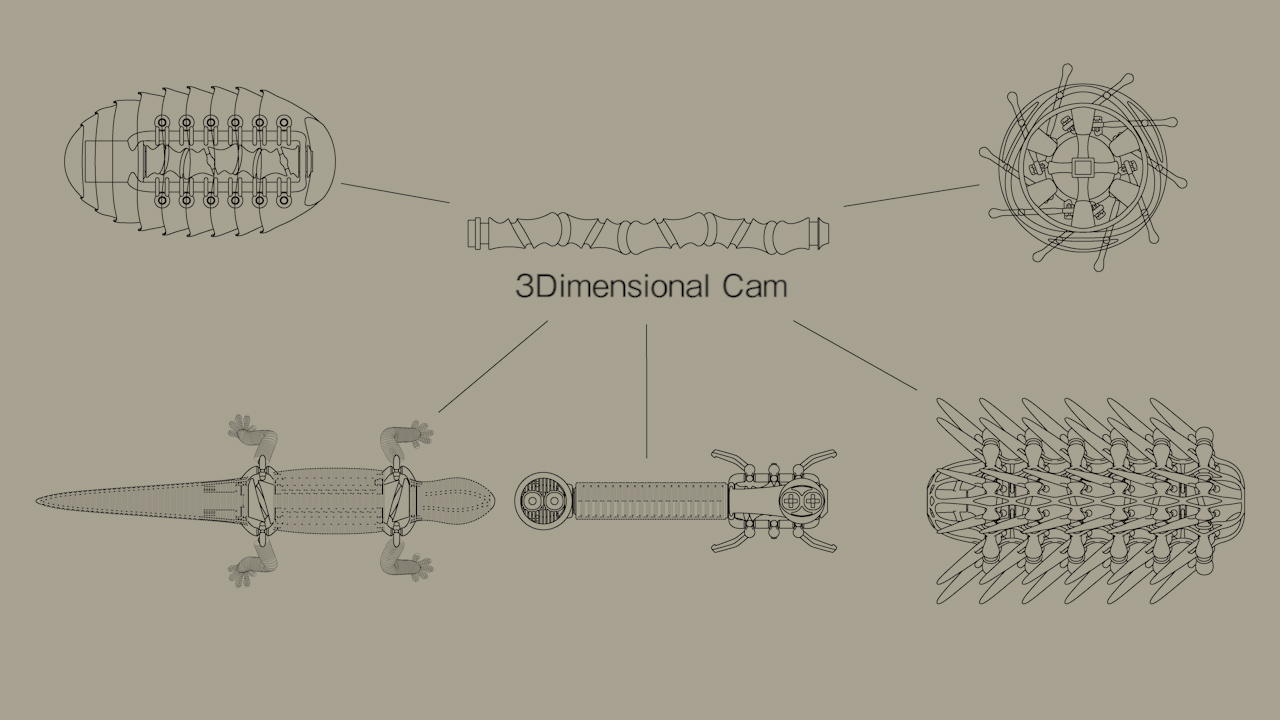
杉原:はい。そこで思いついたのが、この機構で。僕は「三次元カム」って呼んでるんですが、中心の回転軸に3Dプリンターで成型した「三次元の溝」を掘っているんです。この三次元の溝に脚の部品がはまっている状態で軸が回ると、脚が前後上下に動いて歩き出すことができる。いわば、歩く動きが三次元の溝という「ものの形」として、プログラムされていて。だからあとは軸が回るだけで、動くことができるんです。
桐田:この三次元カムで「いけるぞ」って思う根拠になったような、他の研究はあったんですか?
杉原:いや、結構そこは、手探りと思いつきでやっていて(笑)。初めはリンク機構など既存の機構を3Dプリンターでどこまで再現できるか、試してみるところから始めてみたんです。でも、なかなか滑らかに動くものができなくて。そのときに考えたんですが、やはりリンクのような機構だと、動きを変換するための部品の数がすごく多くなってしまうなと。
桐田:確かに。
杉原:しかも、例えば軸と軸受けは、互いにくっつかないように隙間を作る必要があるんですが、それが3Dプリンターで一体成型するとなると、0.5〜1mmっていう機械にとってはすごく大きな隙間が必要で。それぐらいの隙間でも、軸がガタガタになっちゃって、しかも部品の数が多いからガタつきがどんどん足し合わされていく。だから、できるだけ部品を少なくした上で、しかも部品の隙間の誤差を許容できるほど「シンプルな機構」ってどんな形になりそうか、から考えていきました。それでいろいろ試すなかで思いついたこの機構で、やってみたら……うまくいきました(笑)。
桐田:「動く機構」を作ってみたいなって思いは、以前からあったんですか?
杉原:そうですね……。最初から「動くものを作りたい」と思っていたというよりは、研究室で与えられた題材として、3Dプリンティングがあって。「これで何かやってみて」くらいの、ざっくりした感じだったんですが(笑)。ただ、その時3Dプリンターで出来ていたものって置物っぽい作品が多かったので、「どうせなら動くもの、しかも3Dプリンターでしか作れないものがいいかな」って思って。
桐田:なるほど。『READY TO CRAWL』たちを見ていると、昆虫というか節足動物というか、そんな生き物たちが浮かびます。その動きの原型になった生き物がいたのかどうか、個人的に気になっていて。それとも原型はなくて、こういう機構になったんでしょうか。
杉原:両方、ですね。ある生き物の動きを作りたくて、その動きを実現するための機構を考えるっていうトップダウン的に考えたパターンもありましたし、この機構ができたからその展開として、「こういう動きを作り出せるなら、ああいう感じの動きもできるんじゃないか」ってボトムアップ的に思いついたパターンもありました。
生き物の歩く動きを、実現する「機構」(メカニズム)
杉原:なんとなく、「生き物が歩く動きをつくる」っていうことだけは初めに決めてたんですが……どんな生き物かはなんでもよかったんですよ(笑)。どこかに留まって動いているよりも、自由に動き回らせたいとは思っていました。そこで、「生き物の歩く動き」の中で面白い動きの1つとして「多足」の動きをやってみようかって思って、この機構ができました。機構を思いついた後は、その展開として制作していきました。例えば……。

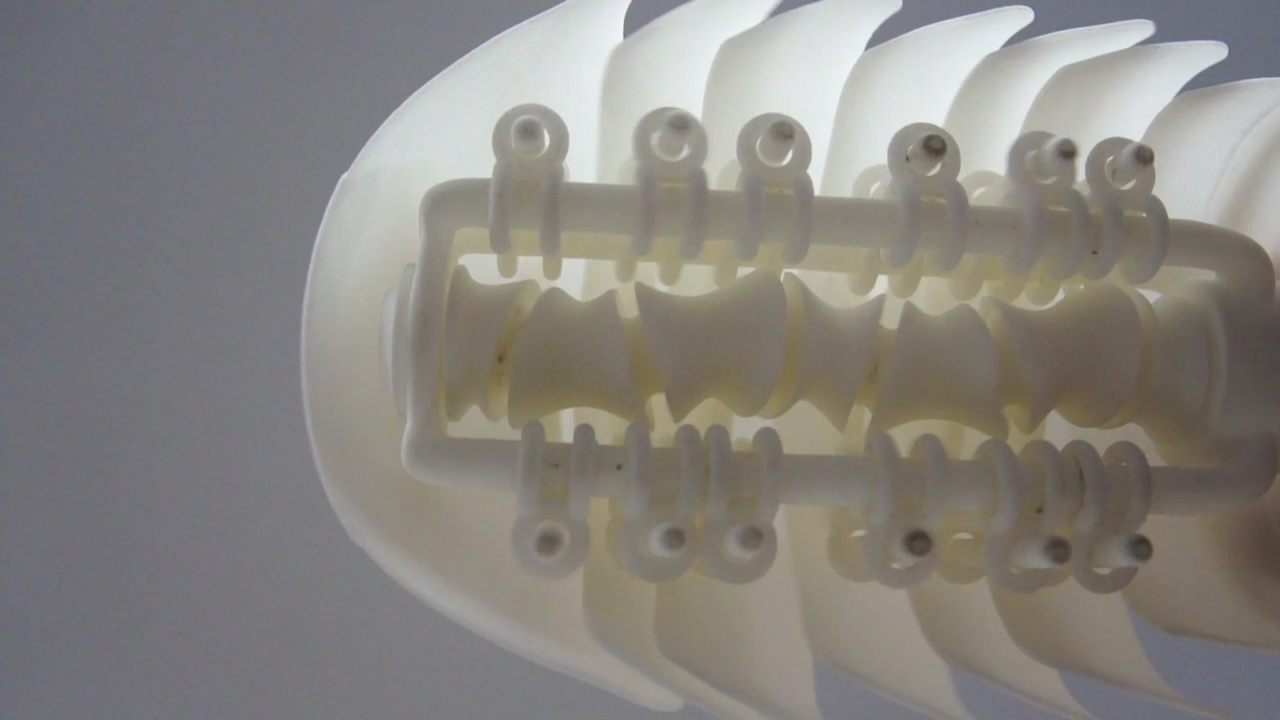
杉原:このOHMU(オーム)は、三次元カムを使うと「足で歩く動き」だけじゃなくって、「足を前後にスライドさせる動き」も作れると気づいて、これに甲殻をつけたら『風の谷のナウシカ』の王蟲みたいな甲殻をこう重ね合わせて進む動きになるじゃないかと。あとは……。

杉原:このYADOKARIは、「歩く」という動作を、もうちょっとミニマルな形、一番コンパクトな、最小限の脚の数でやりたいと思って作りました。その最小限の脚の数が、「三対の脚」だったんです。でも、この三対の脚だと、軸自体も短くなっちゃうのでモーターなどの電子部品を、他のプロトタイプみたいに軸の中に入れることができなくって。かといって、もし電子部品をお尻の後ろに飛び出す形にすると重心のバランスが崩れちゃう。だから、背中に乗っけました(笑)。
桐田:なるほど(笑)。この独特な形には、そういう経緯があったんですね。
杉原:はい。ちょうどこれを作っていた時、たまたま、バネみたいに弾性的なユニバーサルジョイントを使った構造を試してみていて。この構造を使えば、モーターは背中に置いて、モーターの回転を“曲げて”伝えることができるかもしれない。そうしたら最小限の脚の数でも、バランスを崩さずに重心をこの軸の上で固定できるかもって。その結果、ジョイントなどのメカ的な構造もありつつ、歩く部分はこれまで通りの機構を利用する、ちょっと混ざった感じになりました(笑)。
桐田:その作り方もまた面白いですね(笑)。まず機構があって、そこからの応用発展を試してみて。そうして出てきた課題も、機構を自分なりに形を変えていって解決していくような。
杉原:そうですね。そこは作っていく過程での、場当たり的……というか(笑)。三対の脚でやりたいけど重心がおかしくなっちゃう、どうすればいいだろうっていうことも、やっぱり作りながら、機構の仕組みから考えたり……。同時に、生き物のこういう動きもやってみたいな、もうちょっと生き物っぽい柔らかい動きにするなら、どうすればいいだろうって視点から、考えていったりしてましたね。
桐田:なるほど。今は「生き物の動き」の1つとしての、多足的な機構かと思うんですが、今後作ってみたい、多足以外の生き物の動きってありますか?
杉原:そう、ですね……。今のところはベースとして、この機構を使っていくことを考えてます。今日はここに置いてないんですが、この機構をベースにしたものを全部で10体ぐらい作っていて。
(※現在、上に紹介した以外のさまざまなREADY TO CRAWLのプロトタイプを、杉原さんのYoutubeチャンネルからご覧いただけます。)
桐田:すごい(笑)。
杉原:例えば3Dプリンターは「柔らかい構造」も作ることができるので、それを三次元カムと組み合わせることで柔らかい体と動きを持つプロトタイプを作ったり。あとは、ワイヤーを使った機構とかあります。それも、ワイヤーを後から通すんじゃなくて、ワイヤーのような細い形状を3Dプリンターの一体成形で作っちゃって、構造の中に初めからワイヤーを張り巡らせたりとか。

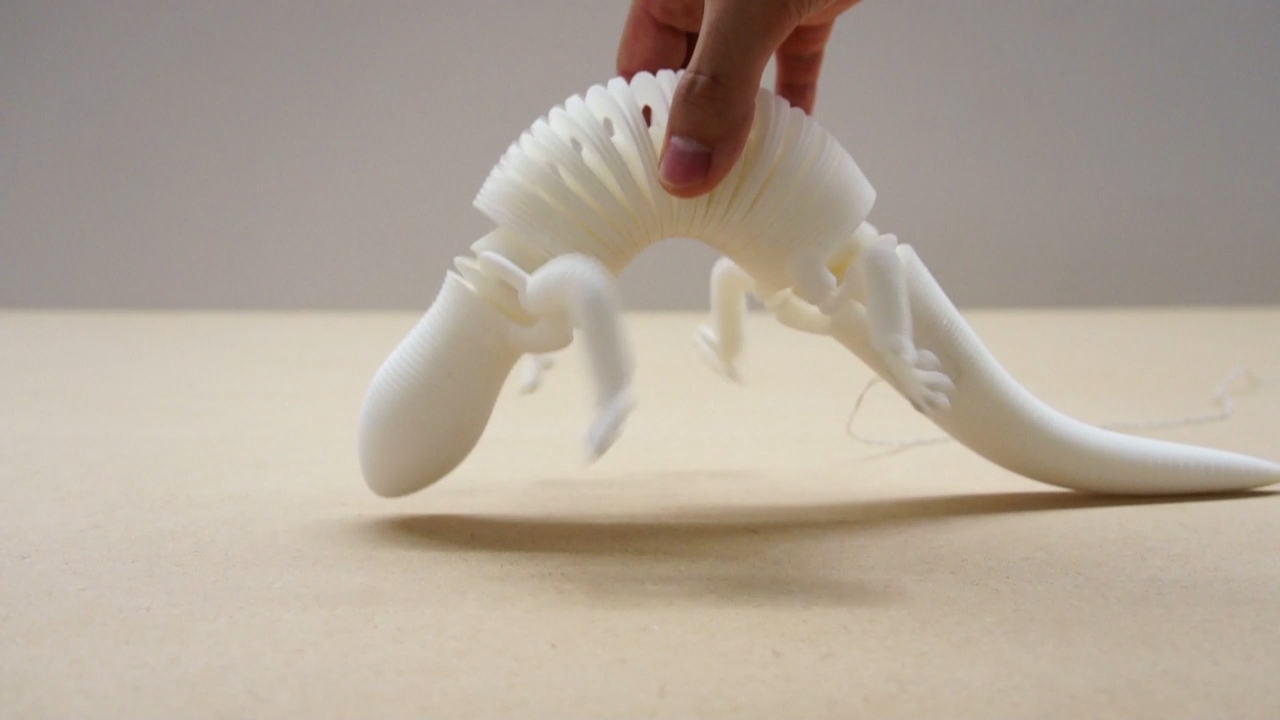
杉原:そんな「3Dプリンターならではの機構」を、今だいたい4つぐらい考えていて。それがある種「遺伝子」じゃないですけど、その掛け合わせで、いろんな動きを展開していくことをやっていきたいんです。
だからもっとこう、その機構自体を増やしていきたいっていうのもあり。今後やりたいのはもっと柔らかい動き、軟体生物的な動きですね。節のある脚っていうよりももっとこう……。
桐田:ぐにゃ〜っとした。
杉原:はい。そういうのはやりたくて。
桐田:MITなどで開発されている、軟体動物のロボット(ソフト ロボティクス)みたいな感じですかね。
杉原:ああ、そうですね、ああいう感じとかはやってみたいですね。まだそうした機構はあまりやれてないので。
(次回に、続きます)