第5期生
手塚 蒼太
SOTA TEZUKA
ロボット
1999年東京生まれ。ハードウェア部分に主眼を置いたロボットの研究・開発を行う。今までにない斬新な機構の開発を目指し活動中。代表作品に、紙のみで構成されたロボットハンド「Origami-Hand」
掲載時点での情報です。
第5期生
SOTA TEZUKA
ロボット
掲載時点での情報です。
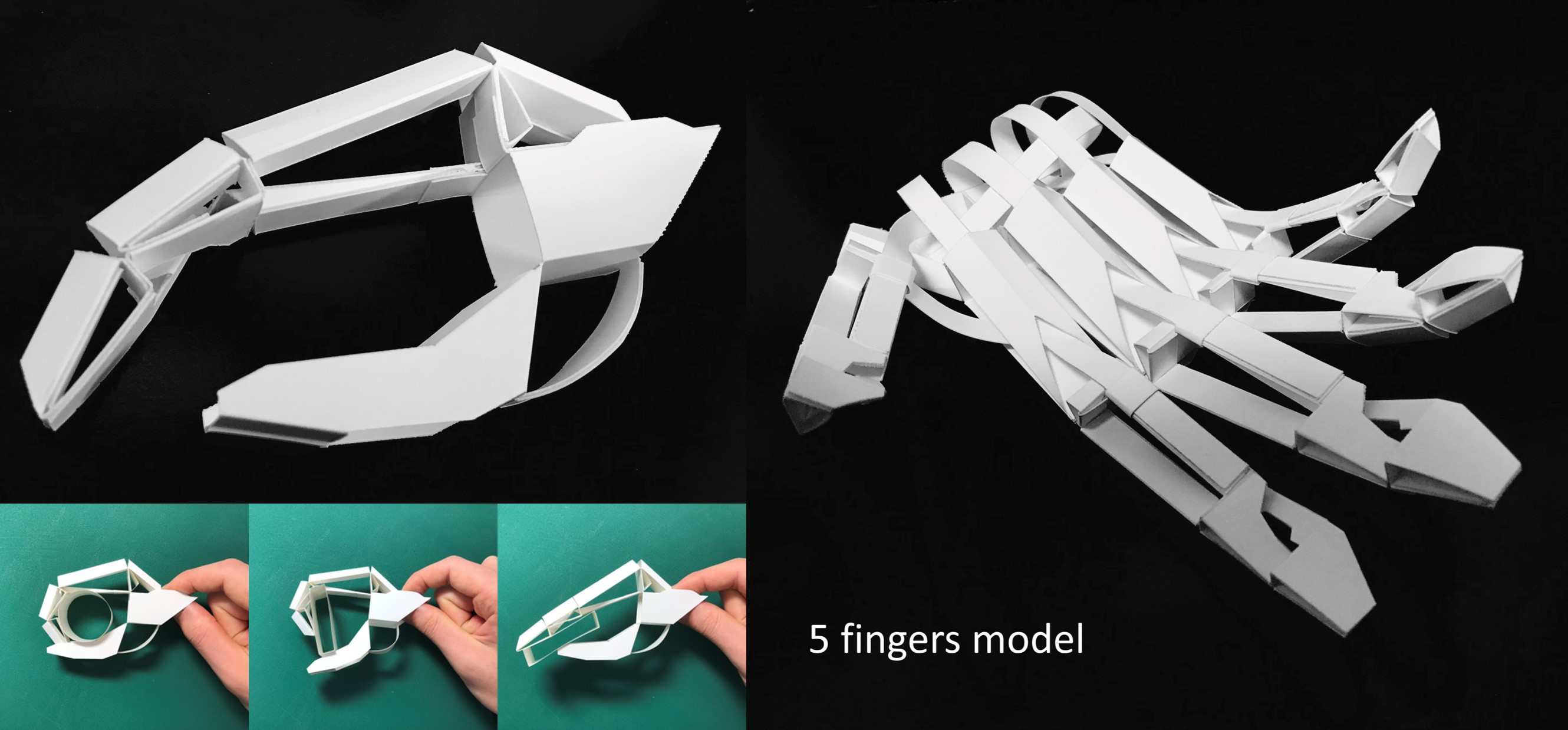
Origami-Hand
紙のみで構成されたロボットハンド。
折り目を利用しリンク機構を構成しており、様々なものを把持可能。使い捨てが容易なため医療・食品などの衛生分野での用途が期待できる。
・JAMES DYSON AWARD 2018 国内準優秀賞
・国際会議IROS2018にて発表
平面加工のみで制作可能な小型メカナムホイール
直径約30mmの小型メカナムホイール。シンプルな構造で小型・軽量のため、市販されているホイールでは難しい小さなロボット等への搭載も可能。材料には板材を使用しており、平面加工のみで短時間で安価に製作可能。

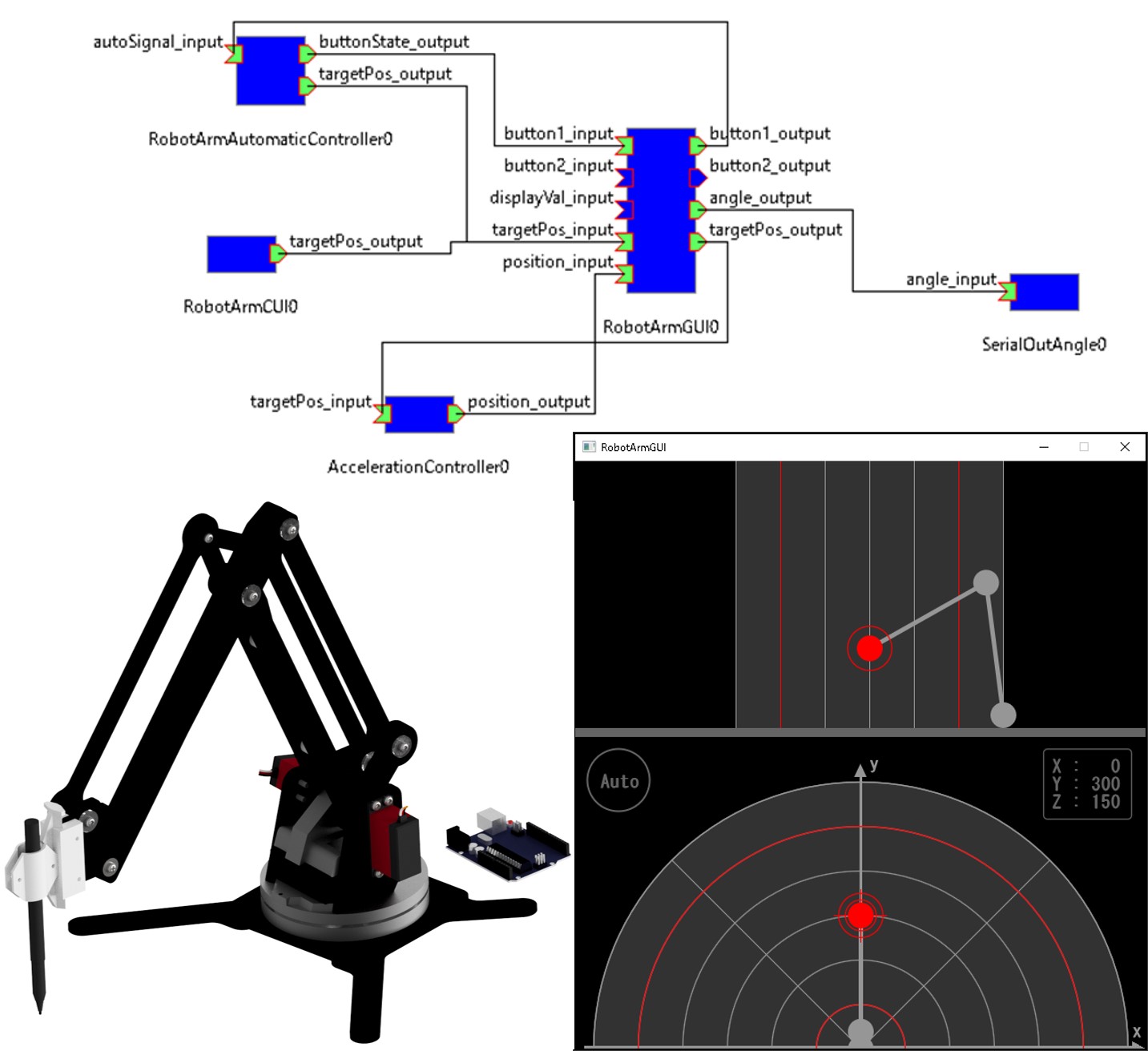
ロボットアーム操作ソフトウェア
シリアルリンクロボットアームを直観的に操作可能なソフトウェア。2次元表示のGUIで操作できるほか、キーボードから手先座標を直接入力する機能や自動制御の機能を備える。デザインも自由に変更可能。ミドルウェア上で動作するオープンソースのコンポーネント群であり、使用者が必要に応じて任意の機能を追加できる。
ご質問は下記のフォームより
お問い合わせください。